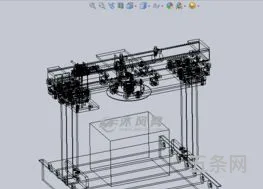
气动机械手设计要求(气动机械臂)

气动机械手设计要求
[5]樊炳辉,逄振旭,李贻斌,苏学成,杨明.多重四连杆机械臂机构[P].中国专利:CN96248553.5,1998-02-08.
选取温室黄瓜采摘为运行背景,先将采摘空间进行简化,再确定各设计变量及机械臂各连接杆,由于机械手在运行过程中腕*的操作臂始终水平,故可不进行优化,只确定四个优化点即可。随后构建一个空间,建立相关的函数,考虑到一定的条件约束来计算优化参数。机械臂的设计包括了函数、设计变量、条件约束等几个方面,针对这些方面设计一个优化箱,进行函数编写,带入约束条件最后得出改良的结果。
手部(亦称抓取机构)是用来直接握持工件的部件,根据设计要求,利用夹钳式手部结构。其中,夹钳式机械手有两个半圆形或者椭圆形的机械手指,手指由驱动电机通过连接传动装置实现其张合以及闭合,从而实现了机械手对所夹持工件的抓紧动作。这种方式的机械手抓具有很好的通用性,能够实现不同外形结构工件的抓紧,所以适用性比较强。
2)设计了一种可高效利用机械臂的立方空间,并提出了一种改良机械臂参数的方法,在温室黄瓜采摘的背景,利用Matlab优化箱对机械臂进行了设计参数的改良。
SCARA机器人常用于精密装配和加工,其机械本体、驱动控制、减速器、电机等都会影响SCARA机器人的精度和运动速度。主要针对一台SCARA机器人对其进行实验台搭建,测试其重复*精度和运动速度,为SCARA机器人性能指标的评定提供一种参考性方法。
气动机械臂
手臂*模块包含了许多零部件,主要有旋转电机、减速器和反馈单元等。在手臂*的内部固定了控制单元和传动系统,以二级减速传动作为传动模式,即齿轮减速传动与谐波减速传动,这种传动模式可以支持手臂*自由度之内的回转运动。下面具体阐述其设计方案:
随着社会不断向前发展,科学技术日新月异,人们的生活水平不断提高,生活节奏也不断加快。在人们的观念中,对生活质量的要求也越来越高。人们在忙碌的工作下,更多追求生活环境舒适和关注生活的轻松氛围。所设计的家用服务机器人能真正满足人们在生活上所需要,能很好地给予提供服务,保证了家庭服务质量,为家庭生活带来了很大的方便。
(2)第二代机械臂,即具有如视觉、触觉等外部感觉功能的机械臂。这种机械臂由于具有外部的感觉功能,因此可以根据外界的情况修改自身的动作,从而完成较为复杂的作业。如:
(5)通用机器人编程语言。在ABB公司的20多个型号产品中,采用了通用模块化语言RAPID。该语言易学易用,可用于各种开发环境,与大多数WINDOWS软件产品兼容。
[7]张立勋,李彦涛,何锋,李成福,高峻,王婷.助餐机器人[P].中国专利:CN200610010497.0,2006-09-06.
小型机械手气动夹爪
目前,由于机械手技术有了快速的发展,同时PLC控制技术以及点控制技术也在生产实践中得到应用,所以,适合在工业自动化生产中使用的通过机械手也有了不小的进展。因为气动机械手具有诸多优势,比如结构简单、*精确、控制便捷等,因此被自动化生产线大量采用。本文将结合自动化生产线的实际情况,进行基于PLC与步进电机的气动手搬运机械手控制的探讨。
随着制造成本的降低、工作效率和可靠性的大副提高,在工业生产中机器人的应用越来越广泛。机械手臂是在机械化,自动化生产过程中发展起来的一种新型装置。在生产过程中,机械手臂广泛应用于自动生产线中,使得现代生产能更好地实现与机械化和自动化的有机结合。下面主要探讨机器人旋转*、传动系统、减速系统进行实现等的设计实现。
(4)在机床加工的同时机械手臂反向横移及下降到待料区,放下被加工好的零件并抓取另一个待加工零件后快速上移且横移至安全门上方指*置。如此循环,直至下达中断指令或零件加工完毕。
在中轴传动方案中,最关键的是旋转模块的结构设计。旋转模块的设计思路是:将其转轴与中心轴线重合,并以电机驱动。在模块上部署有电磁编码器,用于周期性地检测角位移和角速度。将之与直流伺服电机相联。结合具体的应用环境与需求,直流伺服电机也可以加装起到减速增力作用的行星减速箱,共同起到动力输出的作用。而后通过小齿轮与中心齿轮的咬合,以正齿轮传动方式来实现系统的减速增力功能。
相关文章



最新文章
-

环保棕垫和椰棕床垫哪个好(环保椰棕床垫和普通椰棕的分别)
2024-05-30 -
多年父子成兄弟的话题是什么(亲兄弟之间的感情)
2024-05-30 -
符文密码下册(符文密码小说免费)
2024-05-30 -

怎么在word方框里打钩子(word文档√怎么打)
2024-05-30 -
关于感恩父母的作文400字左右(感恩成长路上有良师相伴)
2024-05-30 -

张慧君简历(张慧君的个人资料)
2024-05-30 -

陈冲现在的情况(57岁陈冲一家近照)
2024-05-30 -
关于感恩母亲的作文题目(感恩妈妈的题目建议用什么)
2024-05-30
热门文章
-
芽菜种植方法和技术设备(100平方芽苗菜利润)
2024-05-23 -

慈善祝词(给做公益慈善的祝福)
2024-05-23 -

电脑指法打字教学(键盘打字指法视频教程)
2024-05-25 -

刘梓晨是谁呀(你知道刘梓晨吗)
2024-05-26 -

"四级满分多少,及格多少(四级英语满分和及格分)
2024-05-23 -

肖申克救赎的名言名句(肖申克最经典十句话)
2024-05-23 -

百度文库如何查看财富值(百度文库收益)
2024-05-24 -
社区活动有哪些项目(社区公益服务项目)
2024-05-24
有话要说...